Back
Hoodmaps
Load previous page…
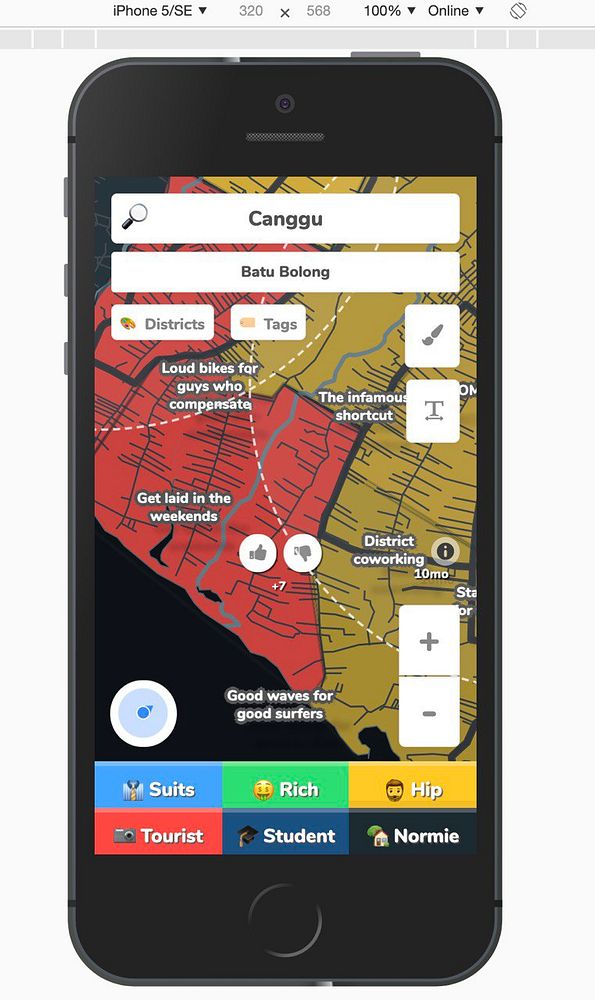
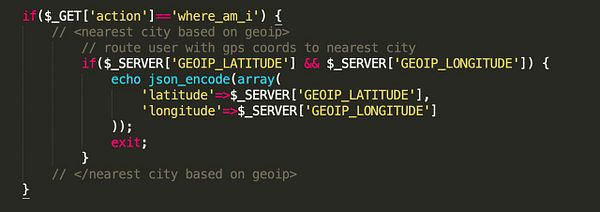
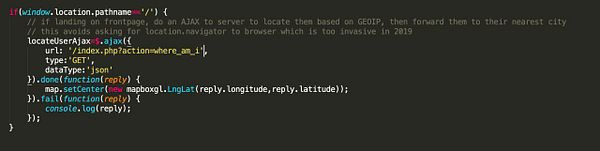
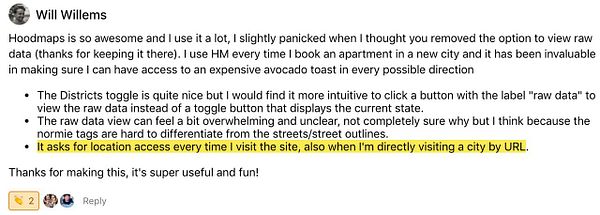
only ask for navigator.geolocation permission when people click GPS icon not automatically cause it's annoying on Safari because it keeps asking  #hoodmaps wip.chat/questions/roast-hood…
#hoodmaps wip.chat/questions/roast-hood…
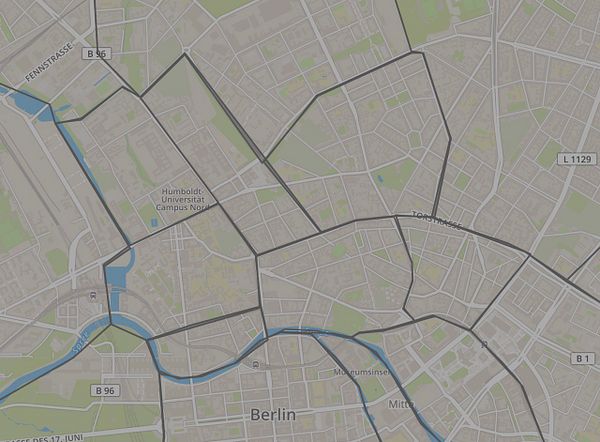
segment Berlin center Mitte even further so that ppl don't get angry on Twitter twitter.com/MaciekLaskus/stat… #hoodmaps